Center For Robotics Software
----------------------------------------------------------
Talk
November 6, 2017
Robotics
InTheDoctorsOffice&Beyond 2018
-------------------------------------------------------
ROS I SEMINAR JANUARY 26, 2018,
February 9, 2018, February 23, 2018

AGENDA INTRODUCTION_TO_CRS
UNIT I: 1.2.1_TLH_WEBSITE CarolFairchild_Bio
1.2.2_FIRST
ROS VIDEOS
1.3_ROS&PEOPLE 1.4.1_ROS_DISTRIBUTIONS
1.4.2
ROS_COMMUNITY
CENG 5434: Microcomputer
Systems Design
Course topics include product
design, software design and interfacing for modern microprocessors and
microcontrollers.
Syllabus
CENG 5434 Fall 2022a Introduce
Ourselves
Homework: HW1
HW2 HW3 HW4
HW5 HW6 HW7
Use
Blackboard for HW Assigments and to Submit your
Answers.
Agenda_8_24_2022
Embedded_Systems_Examples System&Product_Design
MicroprocessorHistory
DevelopmentProcess&Tools
DevelopmentTools_HW2_Data
Languages
TLH_Applications
TLH_Patent1 TLH_Patent2
Agenda_8_31_2022
Microcomputers
BasicReferences2022
Motorola_M68000_ComputerHistoryInterview
Micro1_3
Views
Micro2 PIC877&Development
SomeMath1
Software_Disasters
Watch
Your Conversions
Agenda_9_7_2022
FltPoint
FloatingPoint_Disasters
PIC&Software
References PIC24data_Applications_dsPIC33
PIC24F
MCUs and dsPIC33 DSCs_MigrationVideo
SENSOR
LECTURES 737MAX_failure
Sensors1
Sensors2
SmartSensors&SensorNetworks
Agenda_9_14_2022
InputCapture
AnalogCompare
OutputCompare
Counters_Timers
PWM
PIC_References_Peripherals
----------------------
Agenda_9_21_2022
HW3_Review
Arduino_vs_PIC Accuracy_vs_Precision
A2D_Converters A2D_Lectures A2D_Error_and_MotorAliasing
Data_Acquisition&Sampling DataAcquisition_References
I/O_Ports I/O_Ports2
Agenda_9_28_2022
Serial_Communication_Review Serial_A2D_QSPI DAC
Interrupts
SingleBoardComputers
Arduino_VS_RaspberryPi
Specifying_Single_Boards
PIC_Modules_Videos
Agenda_October_5_2022
FPGAvsGPU_MCU
FPGA_References
Special_Chips
Agenda_October_12_2022
Radio_History1 Wireless_History
Wireless1_General 2_BluetoothVsWiFi
3_IOT 4_HomeDevices 5_WirelessLinks
Agenda_10_19_2022 Quiz_10_26_2022
Agenda_11_2_2022
Good_Requirements TLH_Patents
Patent
831
Agenda_11_9_2022
Lecture_11_2_22_Summary
Designer_or Embedded Systems_Wanted
Agenda_11_16_2022
Smart
Home Security Tips Scroll_Down
Protect
Your Smart Home
When
Refrigerators Attack_Cyber Criminals Infect
Appliances
Final
November 30, 2022 in Class
Final_Project_Report_
Dec. 7, 2022
------------------
ReviewRequirements-11_9_22 Various_Requirements_11_9_22
FINAL_PROJECT_INSTRUCTIONS General
Requirements
Functional
Requirements RequirementsSummary
Design_Specifications
___________________________________________
CENG
5437/4391 – Spring 2023: Mobile Robots
The course presents a study
of techniques applied to the study of mobile robotics.
For our first class 2023 we are fortunate to have two robotics
experts describe
the state of Robotics today. Dr. Luong Nguyen and Miguel Angel Pagan
will conduct this first class.
ENJOY!
Syllabus_Spring2023
Agenda_Jan_18_2023
1_IntroductionToVariousRobots.pdf
2_TurtleBot4&CrazyflieVideos
_2023.pdf
Agenda_Jan_25_2023
Quick_Review_of_First_Class –
Syllabus/Selected videos
Who_is_Harman?
Textbook
for Course RosRoboticsByExample
Class_Textbook_ROS_Robotics_By_Example
Homeworks:
HomeworkEssayRequirements FinalReportGuide
Use
Blackboard for HW Assigments and to Submit your
Answers.
Interviews_To_Hear
History_TimeLine
Shakey Stanley
RodneyMobileRobotControl
**KnowIt Rodney
Talks Fetch
-------------------------------------------
Agenda_February 1_2023
PhysicsReview
Inertia Stopping_Distances
WHY_LEARN_PHYSICS
MotorSelection_Videos
Control_PID_TLH
Agenda_Feb_8_2023 HW1 Review
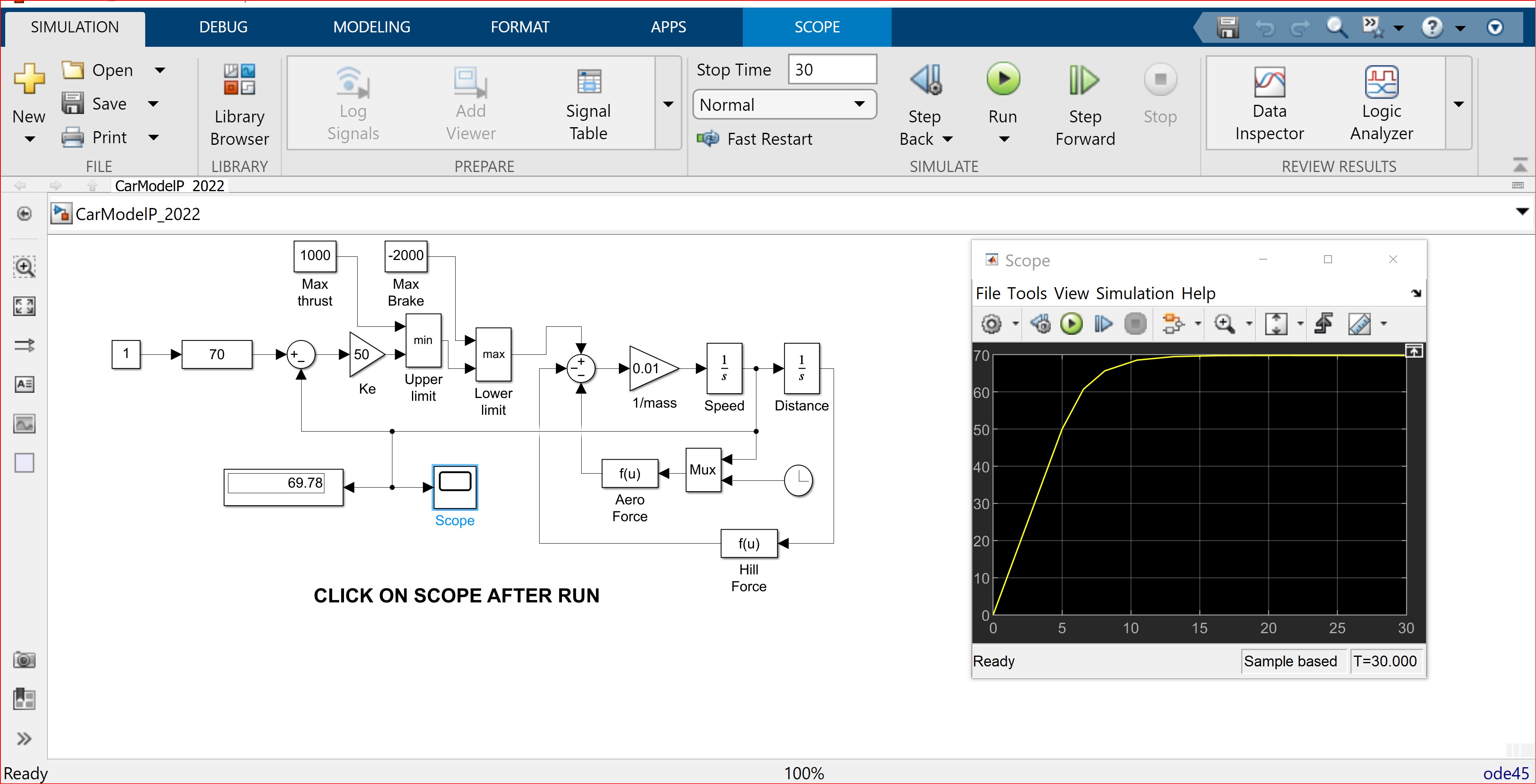
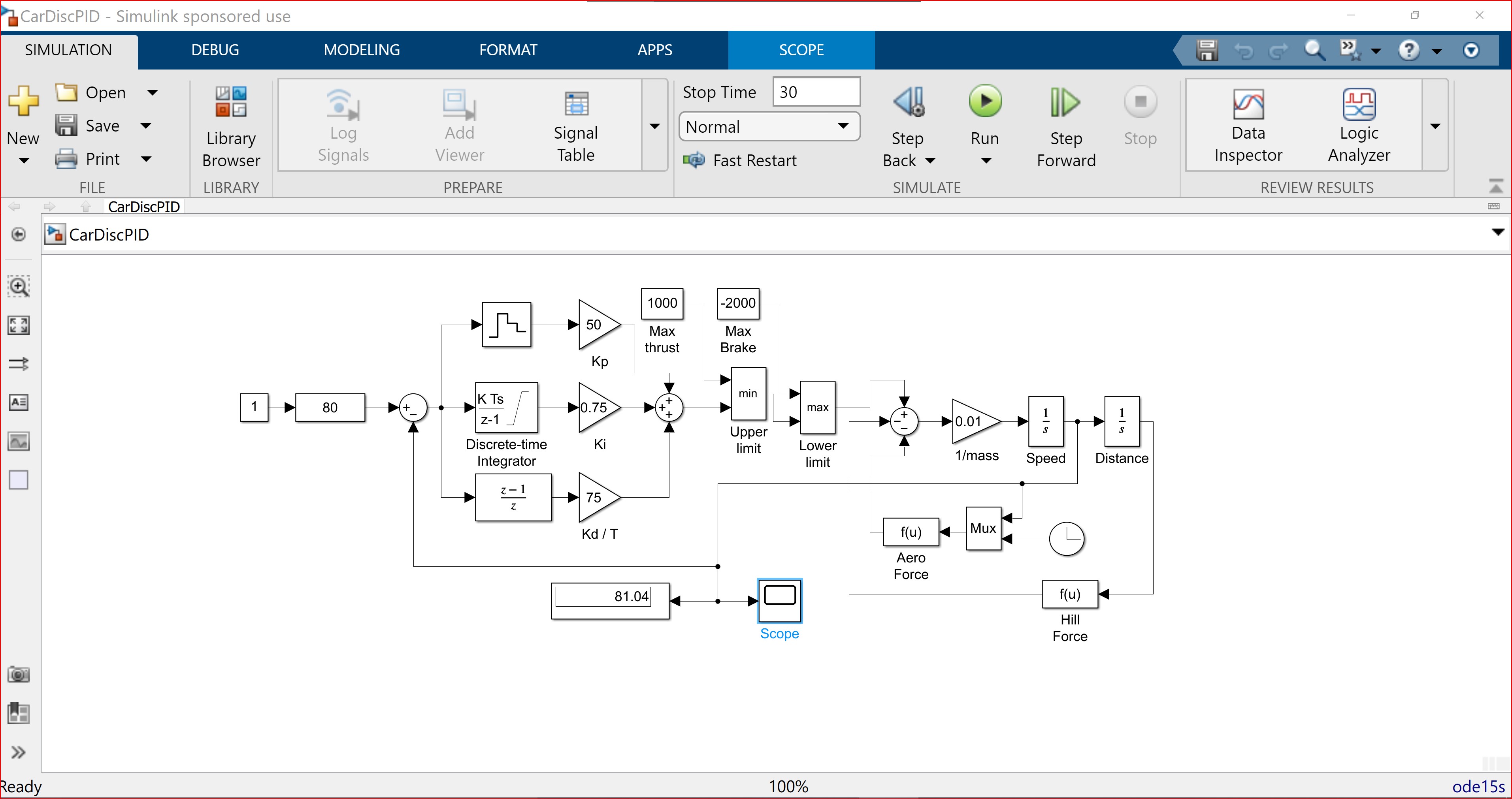
PID_EXAMPLES&Video StateSpace_LinearizeCarModel
Introduction_to_Simulink Simulink_Car_Example_TLH_Dabney
CarModelAnalog CarModelDigital
MotorControl_DC_Klafter PWM_Eshed
Agenda_Feb_15_2023_RobotDemos
-------------
Agenda_Feb_22_2023
General_Review
Intro_To_Sensors1 Intro_To_Sensors2
Optical_Nose_Rice Sensors_3_Niku
Sensor_Slides_4 Radar_Lidar_Camera_Compare
Sensor_Failure_737MAX Sensor_Physics
MISC:
GYROS_ROCK!
Sensors3_Types_accelerometers_Compass_Gyro
Agenda_March_01_2023
Sensors, Homework_Review, and
Review for Quiz
Encoder_Resolution
Sensors_Sampling_A2D
Filter_the_Noise-MATLAB EXAMPLE
---------
Quiz1_March_8_2023
-------------
Agenda_3_22_2-21
DD_robot_slides
Magnus_DD_Robot
ROS and Python K_Control
Review
DD_References Navigation_OdometryErrors&Variance
VideosToWatch Calibration_uncertainty
--------------------------------------------------------------------
Agenda_3_29_2023
HW_FirstProjectReport_
New
Research in Mobile_References.pdf
_____________
Agenda_March_22_29_April_5_2022
Agenda_March_29_April_5_2022
Agenda_April_12_2022
TurtleBot_Simulation_Gazebo Ch3 (Command Line Commands)
1_RVIZ | 2_Gazebo_Basics
3_ROS_Teleop_txt
4_Gazebo_rosnode
5
Gazebo2_KBD
IntroToTurtlebot&Navigation_Presentation1
Review_NavigationFromText_Ch4
6_ROS_NAVII_txt
7_ROS_NAVII_MAPPING
Other Navigation-SLAM References:
Articles: Goebel_ROS_SLAM_Parameters
Monte_Carlo_Localization_Fox_Thrun
Starship_Patent- Mapping_At_UH
Review7_Handbook_SLAM_Cyrill
Of_Course: Probabilistic Robots, Sebastian Thurn, et. al.
SLAM_References
SLAM_References2
ROS_Navigation TurtleBot Mapping
ROS_Navigation_5Day_Course
Agenda_April_19_2022_Flying
Flying_References Bebop_Tracks_Turtlesim
END
WITH A BANG – SELF-DRIVING CARS
Safety_Communication_CyberSecurity_RoboticEngineer
____________________________________________
CENG 5435: Robotics
and ROS
The purpose is to introduce
the students to the use of the Robot Operating System
and the techniques necessary
to program and control real robots.
Textbook
for Course RosRoboticsByExample Text
Syllabus
CENG 5435 Fall2022a FinalReportGuideLines
Homework: HomeworkEssayRequirements
HW1
Use
Blackboard for HW Assigments and to Submit your
Answers.
----------------------
LAB:
Practice:
Logon LogON_LogOFF_D158B LogOff_or_Can’t Log Back In?
FOXY:
Lab1_Ubuntu Lab2_ROS2
----------------
Agenda_August_22_
2022 Introduce_Ourselves
RobotsToAdmire
ROS_Robots_Working BriefHistoryOfRobotics
WhatIsROS1-etc
ROS1_Robots_Mostly ROS&People
FetchRobotics
IEEE_ROS_2013 ROS_Original Design_Quigley
UHCL_Videos_of_Interest
ROS_ROBOTS_Local
ROS_Ubuntu_Distributions ROS_2021_Metrics_Report
ROS_Data&Information
ROSI&ROSM
ROS_Conferences
WHY_ROS2
ROS2_References ROS_Podcast
Agenda_August_29_2022
ROS1_ROS2_TURTLESIM_BRIEF_DEMO
Linux_VirtualBox Github
Ubuntu_16.04 Demo_LinuxTerminalCommands
ROS1_Kinetic_Elements ROS_Terms
------
Agenda_9_12_2022
Ubuntu_Structure
Ubuntu_BASH_Terminal_THH
Ubuntu_Files
LinuxTV&Commands
Ubuntu_Basic_Tutorial
----------------------------------------
Agenda_9_19_2022
iRobot for Fun Review HW2
UbuntuBasicTutorial Linux_Terminal_Commands
Noetic_Installation .bashrc
Chapter1_Commands: Chapter1a Chapter1b ROS_Turtlesim
-------------------
Agenda_9_26_2022
LogON_LogOFF_D158B
Noetic_Install
.bashrc_Source_ROS_distro
Dr_Nguyen_VBox_Instructions
VirtualBox_Install_Data_TLH
-------------
Agenda_10_3_2022
ROS2_CheatSheet Colcon_CheatSheet
ROS2_Examples_Turtlesim_Chapter1_Of_Textbook
ROS1
versus ROS2 Examples – Virtual Box
Chapter
1
ROS2_Summaries_2021 ROS1_ROS2_Features
R1vsR2_1ToPg26Draft R1vsR2_2_PARAMS_Draft
R1_Kinetic R2_Foxy
(TO
Update to Noetic ROS1
or Foxy ROS2 )
Tf_tutorials Turtlesim_rqt_RobotSteering Turtlesim_Launch
--------------------------------
Chapter1
– Kinetic _ Turtlesim
TurtlesimBookReferences
Demo_Chapter1_Kinetic_ROS1 ROS_Kinetic_Cheatsheet
TurtlesimCheatSheet 9_08_2020 Turtlesim References
Turtlesim Guide
TurtlesimControl_Kinetic
Agenda_10_10_2022a
ROS2_Botbuilders_Videos ROS2_mimic_Tsim_Launch
Quick_Review_ROS1_ROS2 Chapter1_ROS2_Foxy
ROS2_Elements&CommandsFoxy
Chapter 2
Ch1_MakePackage_Ch2_Commands ros_robotics
RVIZ_and_URDF_SLIDES Chapter2_URDF
RunningRVIZ_ROS1_RVIZ2_ROS2 Gazebo_Chapter2
Kinetic Version of
Chapter 2
ROS_PKG_CH2_URDF Slide Show
URDF_Gazebo_References
Ch2_URDF_Results Ch2_Gazebo_Results
Gazebo_References
Agenda_10_17_2022
ddrobot_rviz_launch.txt
Quiz_10_24_2022
Agenda_11_7_2022 TurtleBot3 Real Demo
Lab 1, 2
For next week
Agenda_11_14_2022
Kinematics&IK
What
Can Baxter Do?
Chapter6_Baxter MoveIt
PythonReferences
ROS1_ROS2_Features
ROS2_Examples_Turtlesim_Chapter1_Of_Textbook
Agenda_11_21_2022
ROS1_Summary Turtlesim_py_GoToGoal
ROSCon22_TurtleBot4
ROS2_Summary Creating_A_ROS2_Workspace
ROS_Data&Information ROS1_ROS2_Features
November
28, 2022 In
Class Final for Some
Final
Night 2022 Monday December 5, 2022
Reports
2021
Kinetic Stuff
Agenda_10_5_2021 Agenda_10_12_2021
Chapter
3 TurtleBotGuide
TurtleBot&Mobile Robots
Ch3_TurtleBot_Gazebo
Python_Examples timed_out_and_back_TLH.py
Turtlesim_Turtlebot_remap
Turtlebot&Gazebo_Ch3
Lab2:
TurtleBot_Exercises ControlTurtleBot.py
MoveTBtoGoalPoints.py
Agenda_Oct_19_2021
Ch3_
Review
REAL_TurtleBot2_HPCheatSheet_Alienware_10_03_2019.pdf
TurtleBot_Gazebo_1_9_22_2020.pdf_CH3
Chapter
4 TurtleBot-2-CheatSheet-Mapping
Turtlebot_Demos_Mapping_ Ch4
TurtleBot_Mapping_Refererences
ROS_NAVSTACK_References
Laser_Scan_Lidar
Chapter3_Ch4_ConstructReferences
CENG5435_ROS\0_CENG5435_4391_Fall2021\5435_Lecture_11_9_2021\0_CENG
5435_4391_ AGENDA November_9_2021.pdf
Lab3:
TurtlebotNavigation_Gazebo
Chapter
5 Read the Book – Learn Xacro
Agenda_October_26_2021 TurtleBot3 Demo
Agenda_November_2_2021
Agenda_November_9_2021
BaxterSimulator Baxter_Using a state machine_YMCA
Baxter_Videos_2021
Chapter
6 WhatHappenedToBaxter? Collaborative
Robots
Safety Patent873
Introducing MoveIt!
MoveIt Guide Rethink_MoveIt_URDF
Baxter&BaxteSim_See ROS I SEMINAR_Unit3_Above
BAXTER THE ROBOT
NASA Baxter
Introductory Videos
Baxter
Introduction Guide Baxter
User’s Guide Baxter-ROS
Baxter&ROS_References lnverse_Kinematics
Agenda_November_16_2021
Agenda_Nov_23_2021
Agenda_Nov_30_2021
General
references:
ArmControlKeyBoard
Issac
Asimov
References_Kinematics
ROS_Summary ROSppt_Long ROS_update&Git
ROS_Industrial
CENG 6533: Robotics
The course presents a study
of techniques applied to the study of robotics. The purpose is to introduce the
students to the use of robots and the techniques necessary to design and
develop hardware and software for applications.
Syllabus
Sp2015 TA HW1 HW2 HW3 HW4
HW5
HW6Project
HW7
HW8 ROBOT HISTORY
Adept
Specs RobotSpecs RobotSystem 10Mistakes
RobotPhysics
Xforms1
RobotControl
MotorControl_1
MotorControl_2
Bode_Tracking
StepperMotorDesign RobotPWMcontrol
Sensors Software Safety
References
1/18/2015 Collaborative
Robots FinalReview
----------------------------------------------------------------------------------
CENG 4391
Introduction To Robotics
HomeworkEssayRequirements
Syllabus SP2016 HW1 HW2 HW3 HW4 HW5 ANS_HW4
ANS_HW5 HW6_ProjectReport1
FinalReportGuideLines
References1_17_16 Physics TF Sensors ROS_Summary
TurtlesimGuide
TurtlesimCheatSheet TurtleBotGuideI TurtleBotReferences
Quaternions
ControlForRobotics DCMotors PWM_Control________________
__________________________
CENG 6838: Research Project (CENG Capstone
Project Course)
Syllabus ProjectReport1
ProjectReport2
ProjectReportFormat
HomeworkEssayRequirements
TurtlesimGuide
TurtleBotGuideI
Baxter
User’s Guide
TurtleBotReferences-Mapping TurtleBotMappingCheatSheet
BaxterHW1 BaxterHW2 BaxterHW3
HelpBaxterSee Baxter
Work 2_18_GolfBalls
TurtleBotHW1
TurtleBotHW2
Projects Fall
2015 Projects
Spring and Fall 2016 Projects
Spring 2017
KinectReferences
The course assignment will
consist of project of interest to the student. A written report and oral
presentation will be required.
We invite
students in CSCI and SWEN to consider these courses as electives. They
emphasize practical aspects of computer specification, selection and use.
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}